Привіт усім любителям спортивної картографії! Сьогодні стала доступна для завантаження Beta OCAD 12, але я хочу розповісти про іншу знахідку – це проект OpenOrienteering і його вражаючий компонент Mapper (OOM), тим більше що changelog OCAD 12, виглядає якось не дуже агресивно. Втім, подивимось.

Проект OpenOrienteering об’єднує декілька інструментів для спортивного орієнтування, одним з яких є Mapper – конкурент OCAD. Отже, що пропонує нам Mapper і чому я в захваті від нього.
- Mapper це open source. Mapper розповсюджується під ліцензією GNU GPLv3, це означає що він безкоштовний. Так, зовсім безкоштовний. Назавжди. Просто завантаж, встанови і використовуй!
- Mapper працює тупо скрізь! Байдуже Windows у вас чи Linux. Код кросс-платформений і може бути зібраний хоч для Nokia N900. Версія для Android до речі теж є, але я її ще не пробував
About OpenOrienteering Mapper 0.5.99 - Mapper швидкий. Дуже швидкий! Підложка розміром 23Mb відображається у OCAD 10 приблизно за 10 секунд, а у Mapper – менше ніж за секунду. Рендеринг карти відбувається миттєво, а в OCAD я часто бачу затримки при швидкому скролінгу, або маштабуванні. Крім того, у OCAD іноді з’являються артефакти (помилки рендерингу) і доводиться тиснути на F5
- Всі основні інструменти мають одноклавішні скорочення. Це означає що можна працювати максимально ефективно використовуючи обидві руки. Ось довідка на Github Pages (англ.)
- Практично будь-який інструмент працює краще ніж аналог в OCAD. Наприклад для малювання прямих і кривих ліній використовується єдиний інструмент, функції якого розділені за допомогою жестів миші. Це означає що потрібно робити менше дій для переключення між інструментами, і особливо при компонуванні прямих та кривих ділянок у одній лінії. Така сама штука з колом/еліпсом. Прямокутні форми при малюванні показують напрямні лінії… Дрібні приємності тут буквально скрізь!
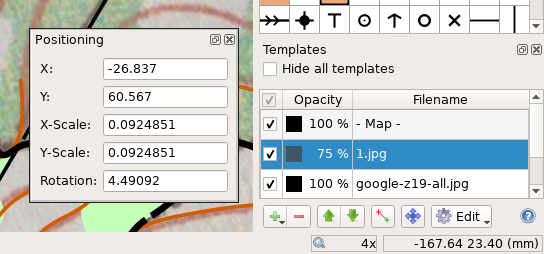
- Розширені можливості по роботі з підложками.
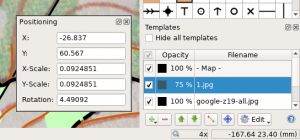
Діалог роботи з підложками Можна відкрити необмежену кількість підложок, навіть дуже великого розіру. Підложки бувають гео-прив’язаними, або звичайними (наприклад GPS-трек це гео-прив’язана підложка). Можна встановити не лише видимість, але і прозорість кожної підложки окремо (в тому числі і прозорість самої карти). Також підложку можна обертати і масштабувати по осям, не закриваючи. Діалог відкриття, до речі, теж більш логічний ніж у OCAD.
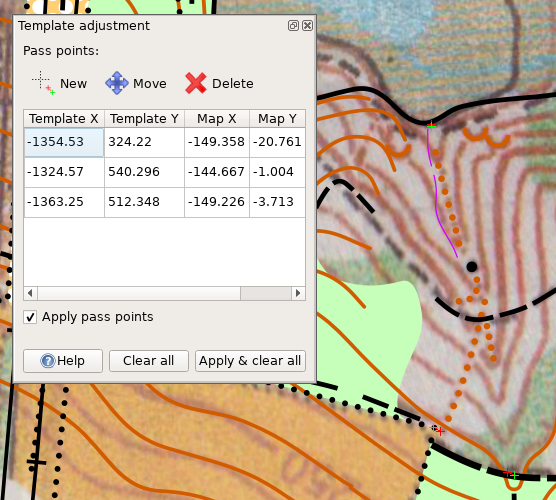
- Гнучка прив’язка підложки.
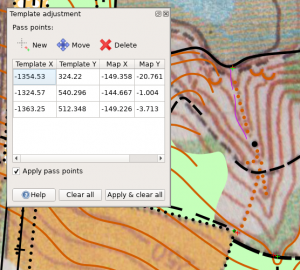
Прив’язка підложки Маленькі червоні і зелені хрестики у області карти показують точки суміщення підложки з картою (червоні на підложці, а зелені на карті). Їх можна видаляти, рухати або додавати нові. Для того щоб рухати підложку у OCAD її довелося б відв’язати і прив’язати заново повністю по всім точкам суміщення. Працюючи з кожною точкою прив’язки окремо я економлю купу часу на такій задачі як підгін старої карти під супутниковий знімок.
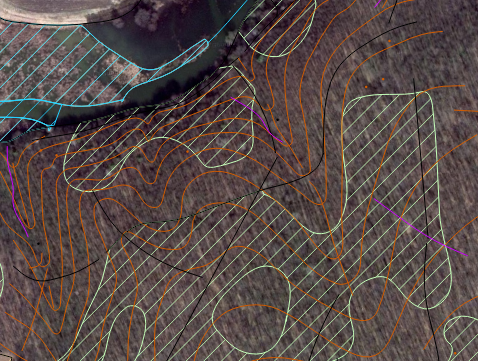
- Додаткові режими представлення карти.
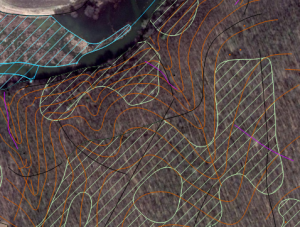
Режим Baseline На зображенні вище режим Baseline, що чудово доповнює знайомий нам з OCAD режим Hatch Areas. Тепер можна не боятися зафарбувати точковий об’єкт площею, або лінією.
- “Магічні” інструменти. Ага, тут їх цілий набір. Наприклад залиття замкненої області, автоматичне видалення зайвих точок з кривої з її згладжуванням, автоматичне інтелектуальне замкнення області, ну і їх там є ще…
- 64-розрядність. Ага, привіт OCADу, який досі не вміє утилізувати понад 2.5 Гб пам’яті :)
Думаю що цього достатньо щоб ви спробували OpenOrienteering Mapper. До речі він вміє працювати з ocd-файлами 8-ї версії. Сподіваюся що хлопці з OCAD Cartography помітять загрозу і OCAD 13 буде сповнений різних крутих фіч і приємностей, а я покищо зберігаю спокій і переходжу на OpenOrienteering Mapper.
Усім добра! І хай живе open source!
